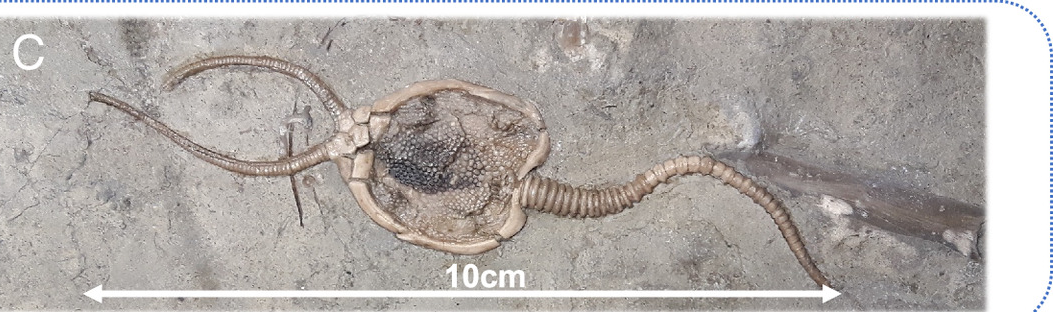
Figura 1. Fósil pleurocistítido
Los Pleurocystitidia fueron unos equinodermos de hace 400 millones de años de aspecto bastante distinto de los actuales. Presentaban una “cabeza” (teca) aplanada con dos apéndices alimentarios con el orificio anal agrandado y un largo tallo flexible, mediante el cual debían de desplazarse en busca de alimento, en vez de ser sésiles y alimentarse por filtración como hacían otros equinodermos de su tiempo (figura 1).
La forma de desplazarse de estos animales ha sido muy difícil de averiguar, por la falta de rastros en el sedimento y por la ausencia de animales que hayan podido servir de modelos.
Hace poco más de una década que se utilizan robots en el estudio del movimiento de los animales, y antes se han construido para diversas finalidades robots que reproducían de alguna manera ese movimiento. Por lo regular, en la robótica con fines de investigación zoológica se estudia el movimiento de vertebrados vivos, especialmente tetrápodos, además de artrópodos y en general se construyen robots con piezas rígidas. También se han usado robots en el estudio de animales extintos, como un trabajo sobre Orobates pabsti, un fósil tetrápodo que vivió hace 300 millones de años. Estos estudios sobre animales vertebrados extintos han contado con la existencia de parientes vivos, además de los fósiles, de huellas, de bancos de datos y de bancos de pruebas, y también se han hecho con robots de piezas rígidas.
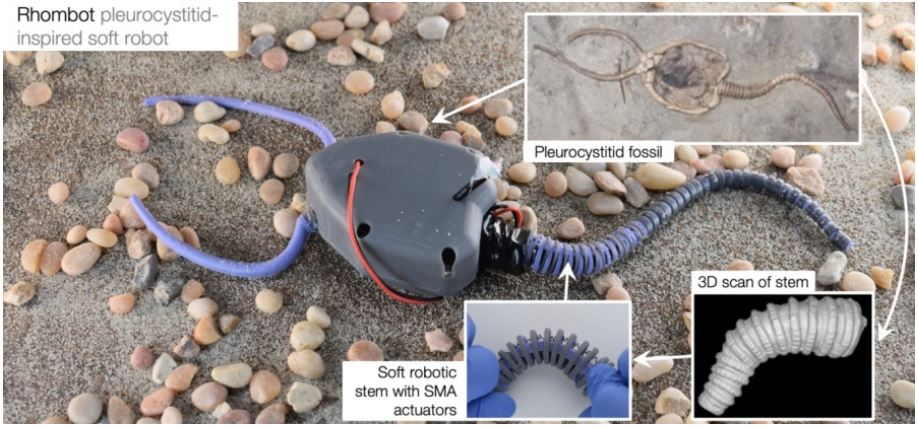
El año pasado (6/11/23) apareció en PNAS un estudio sobre el desplazamiento de estos equinodermos extintos (https://doi.org/10.1073/pnas.2306580120) empleando la robótica. Hasta hace poco ese estudio concreto no era posible, por la rigidez de los robots disponibles. Los autores del estudio se han beneficiado de la naciente robótica blanda, construyendo un robot libre con un cuerpo duro, la teca, y un tallo flexible (figura 2), con partes construidas mediante impresión 3D y con elastómeros para replicar el tallo. Diversas herramientas de simulación sirvieron para preparar la acción del robot, así como para hacer cálculos sobre su desempeño real. Hicieron desplazarse al robot sobre diversos tipos de superficies y en diversos sentidos: del tallo a la teca (propulsión) y a la inversa (tracción).
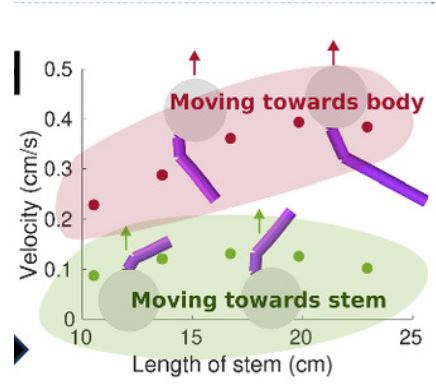
De las simulaciones y del comportamiento del robot se infiere que los pleurocistítdos se desplazaban hacia delante (hacia la teca; el desplazamiento hacia atrás resultó muy poco eficiente: figura 3).
Variando la longitud del tallo, concluyeron que parecía que a mayor longitud, mayor velocidad y eficiencia, aunque parecía producirse una meseta en la gráfica correspondiente, conclusión a la que contribuyó el saber (por la cantidad de fósiles conocidos) que en su ontogenia se daba crecimiento del vástago (figura 4).
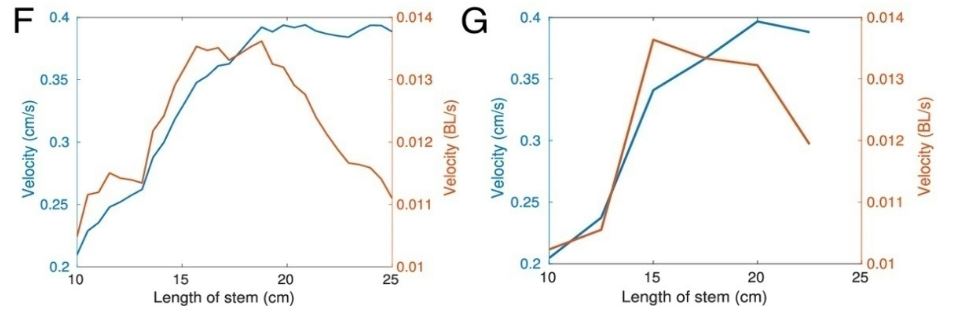
No encontré en el artículo información, por lo que respecta a la meseta, sobre la longitud máxima de los tallos de los fósiles.
Este trabajo consolida una técnica de investigación y estudio del comportamiento posible de animales extintos para los que no se dispone de parientes ni análogos vivientes, a la que los autores de este estudio han llamado paleobiónica, y abre a la paleontología todo un campo al que hasta ahora no tenía acceso.
Marzo de 2024
(Figuras extraídas del artículo comentado)